
Des robots en association pour un système robotique reconfigurable
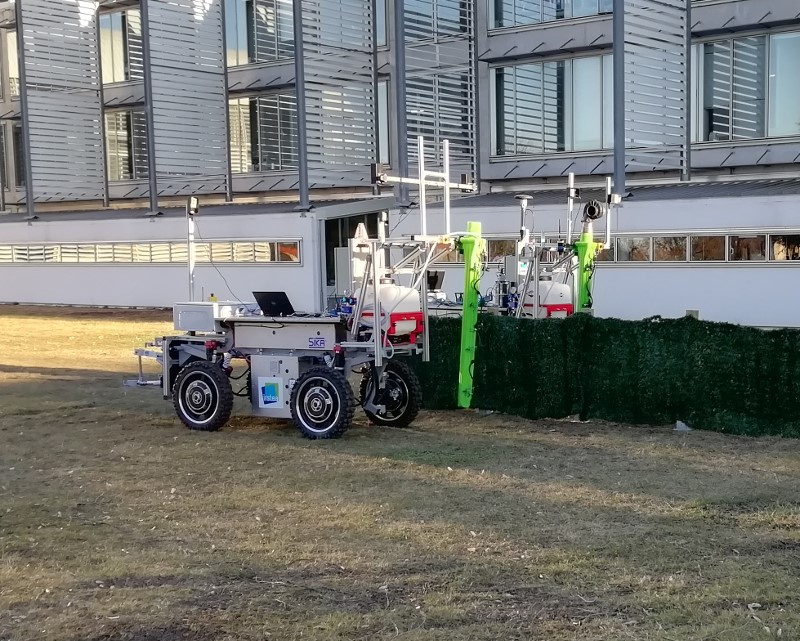
Deux robots ADAP2E simulant une tâche de pulvérisation
L’inflexion du projet vers un système robotique reconfigurable composé de plusieurs robots a amené à proposer un appel d’offre pour l’acquisition de deux robots jumeaux, permettant de valider le concept.
Cet appel ayant été infructueux vis-à-vis du respect du cahier des charges, l’équipe du projet Adap2E a été amené à assurer elle-même la conception et la fabrication de ces 2 robots de façon indépendante, redéployant le financement prévu en sous-traitance vers de l’investissement. Les robots, présenté sur la figure ci-contre ont amené un retard de 9 mois dans le planning préalable du projet, sans être préjudiciable aux deux axes de travail portant sur le développement de comportement élémentaires et la supervision. Ainsi la démonstration mettant en œuvre les deux robots simulant une tâche de pulvérisation confinant un rang de vigne (correspondant à l’application privilégiée du deuxième scénario) a bien pu être mise en œuvre à la fin du projet. La reconfiguration mécanique consistant ici à associer les robots dans un comportement « côte à côte » durant le travail sur le rang et se dissociant pour effectuer une opération de demi-tout, dont le comportement est équivalent à la modification de la voie et de la garde au sol pour la transition entre situation de travail et changement de rang.
Une banque de comportements élémentaires opérationnelle et exploitable
Le comportement d’association de robots [RI3], [CI 12, 13, 10], développé durant le projet et non prévu initialement, n’est qu’un des 9 comportements élémentaires développés durant le projet (voir tableau 1) sur les 10 initialement prévus. Développé dans un premier temps sur les principes propres au suivi de trajectoire par GPS, il exploite dans un second temps une technologie basée sur des balises radio UWB (Ultra Wide Band) permettant de s’affranchir des limitations liées au récepteur satellite.
Si les comportements sur le suivi de cible et la traversabilité [CI4] ont bénéficié de l’apport du projet ANR Baudet-Rob[1], les autres comportements ont étés développés dans le cadre du projet et testés, en attendant la disponibilité des prototypes Adap2E, sur des robots déjà présent au sein de l’équipe constituée par le projet. En particulier, les comportements suivant on fait l’objet de contributions scientifiques propres :
- Le suivi de trajectoire adaptative et prédictive, notamment à haute vitesse [RI2], [CI 9, 3], pour lequel une approche originale d’observation multi-modèle a été proposée. Dans le cadre d’Adap2E, cette méthode a été testée en utilisant comme source de localisation le GPS ou des balises UWB.
- Le contrôle de robot à deux trains directeurs [CI15, 12, 5, 2]. Déjà étudié pour le contrôle indépendant de la position et de l’orientation d’un robot, deux méthodes utilisant les approches par backstepping ont été ici proposées.
- Suivi de structure par Laser. Compte-tenu de l’application privilégiée, ce mode de commande a particulièrement été étudié, tant au niveau de la détection de rang par diverses modalités [CI 4, 1] que du tracking [Cinv4], dont les contributions sont en cours de publication.
- Adaptation des propriétés des suspensions [CI8]. Ce mode de commande, traité uniquement en simulation a été développé en prévoyant la mise en place de suspensions active sur les deux prototypes, conçus pour recevoir cette évolution et sur lequel une thèse, financée par le Labex IMOBS3 débute en 2019.
Ces différents comportements élémentaires ont été normalisés et codés sur une forge logicielle exploitant le middleware ROS (Robotic Operating System). L’objectif est ainsi de pouvoir partagé avec la communauté scientifique ces éléments en la rendant accessible. Une partie seulement de cette forge est exportée au moment de la rédaction de ce rapport.
[1] Projet ANR Astrid Maturation mené par Irstea en parallèle du projet Adap2E de 2015 à 2019

Communication autonome des modes pour la réalisation du scénario S2
Des processus décisionnels en devenir
Au-delà des contributions relatives à chacun des modes de déplacements, le projet a permis de mettre en œuvre des méthodes de planification capables de lier le volet robotique au volet agronomique [CI12, 6]. Ces approches sont basées sur les principes du Model Checking (voir en particulier [RI3]), permettant de valider l’utilisabilité des modes de commande en fonction de l’espace et du temps, ainsi que de la tâche à réaliser. Cette méthodologie permet non seulement de planifier l’enchaînement préalable des actions, mais également de vérifier l’utilisabilité des comportements élémentaires en fonction de la situation rencontrée.
Ce point de vue a été appliqué sur les démonstrateurs en exploitant les interface ROS de machine a état à partir des scénarios identifiés en début de projet. La figure ci-contre montre notamment la réalisation du scénario S2 avec un seul robot. Celui-ci suit dans un premier temps une trajectoire par GPS l’amenant à l’entrée d’une parcelle, puis commute sur le suivi de structure par laser une fois dans la parcelle. Une fois achevé, le robot passe au rang suivant jusqu’à l’accomplissement de la mission (ou son échec). L’approche développée et mise en œuvre dans ce projet permet la réalisation de l’ensemble des scénarios identifiés, mais requiert cependant de prévoir l’ensemble des possibilités durant la mission. Aussi, pour aller plus loin et permettre une plus grande autonomie, l’exploitation de méthodes basées sur l’apprentissage sont envisagées à ce niveau.










Commentaires récents